Automatic Recognition of Object - Put project title here
Saad Moasood Khan, Fahd Rafi
Using traditional SLAM/SFM based approaches the task of localization becomes intractable when the area under investigation reaches city/town size. The amount of data (pictures/videos) required to visually map a city, comprehensively, can be exhaustive for most search algorithms. To circumvent this problem in this project we visually map the area using route panoramas. Route panoramas (pushbroom images) provide a compact yet comprehensive medium to visually capture large areas. They are easily generated by mounting a camera on a moving vehicle (car) and driving around town. Given a query image taken at an arbitrary location in the area, we show that we can accurately recover the location of the camera by finding its epipole in the route panorama of the scene. To this end we have shown that there exists a fundamental matrix between a route panorama and a perspective image of the same scene. The fundamental matrix is calculated using feature matches as correspondences between the query image and the route panorama.

Figure 1: An
example route panorama. The route panorama is closely estimated by a
linear pushbroom camera ( ortho-perspective). The ortho-perspective
projection (orthographic horizontally and perspective vertically)
means closer objects like cars, trees and poles get squeezed in, while
important landmarks, like buildings that are further away are adequately
captured.
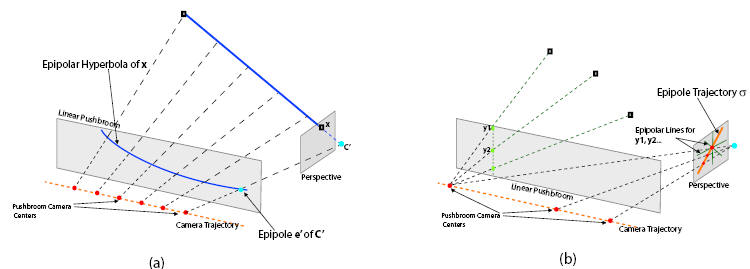
Figure
2: Demonstration of the epipolar geometry between a perspective and
linear pushbroom camera used in our approach to link up perspective and
pushbroom (route panoramas) images.
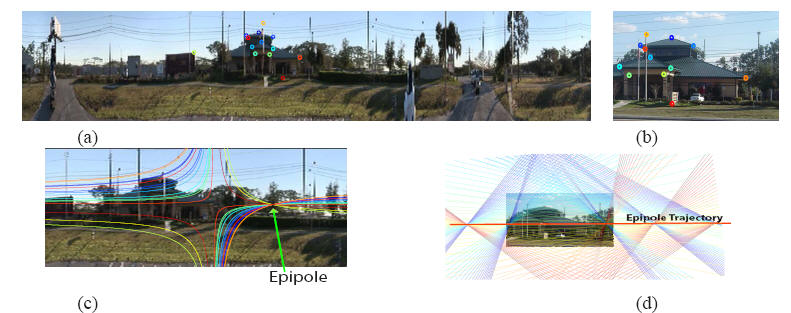
Figure
3: Some results. (a) is the route panorama. (b) is the test perspective
image captured in the scene. (c) shows the epipole of the test image in
the route panorama. (d) shows the epipole trajectory in the test image
i.e. the projection of the camera trajectory used to construct the route
panorama.